スポーツなどをしていると続けていれば、ある程度は上達していき楽しさも増してくることが多いです。
うまく出来ると楽しいといったループに入って技術を高めようと努力をしてもどこかで頭打ちになる時があります。
そのような時に上手くなりたい動作をひとつひとつ分解して考えていき、
苦手な部分を強化して実際の動きにつなげていくと以前より動きがよくなることがあります。
得意な動きや苦手な動きを理論的に見分けるのに、ジョイントバイジョイントセオリー(Joint-by-Joint Theory)を知っていると役に立ちます。
ジョイントバイジョイントセオリー(Joint-by-Joint Theory)とは
身体の主要な関節が「モビリティ(可動性)」と「スタビリティ(安定性)」のどちらを主に担うかを定義する理論です。
人間の身体は、足首から脊椎、肩、腕に至るまで、関節が交互にモビリティとスタビリティの役割を果たすように設計されています。
□モビリティを担う関節 動きの自由度が高く、大きな可動域を持つ。
□スタビリティを担う関節 動きを制御し、安定性を提供する。
この理論は、身体を一つのシステムとして捉え、ある関節の機能不全が他の関節に影響を及ぼす「代償動作」を引き起こすことを強調します。
例えば、足首の可動性が不足すると、膝や股関節が過剰に動いて負担が増え、結果的に痛みや怪我につながる可能性があります。
主要な関節とその役割
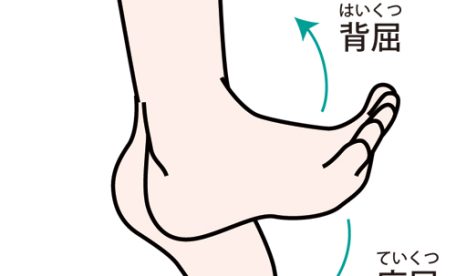
□足首 モビリティ(特に背屈と底屈)。足首は地面との接点であり、歩行や走行時にスムーズな動きを確保する。
□膝 スタビリティ。膝は主に一方向(屈伸)に動く関節で、安定性が求められる。
□股関節 モビリティ。股関節は多方向に動く球関節で、大きな可動域を持つ。
□腰椎(下部背骨) スタビリティ。腰椎は背骨の動きを制限し、姿勢を維持する役割。
□胸椎(中部背骨) モビリティ。胸椎は回旋や側屈が可能な領域で、上半身の動きを支える。
□肩甲骨 スタビリティ。肩甲骨は肩関節の動きを支え、安定した土台を提供する。
□肩関節(上腕骨) モビリティ。肩は大きな可動域を持つ球関節で、多方向の動きが可能。
□肘 スタビリティ。肘は主に屈伸と回内外を制御し、安定性を保つ。
このモビリティとスタビリティと理解すると体を無駄なく動かせるようになるきっかけになります。